































Ogólny zwycięzca: zespół Bullseye z Uniwersytetu Wageningen w Holandii; Zadania freestyle z wizjonerskimi koncepcjami; Symulacja terenowa jest wyzwaniem z ogromnymi korzyściami w nauce; Ponad 500 międzynarodowych widzów online w ciągu trzech dni
(DLG) 18. międzynarodowe wydarzenie robotów terenowych, konkurs robotów terenowych dla międzynarodowych drużyn studenckich, które odbyło się w tym roku po raz pierwszy w formacie wirtualnym na platformie cyfrowej DLG, zakończyło się wysokim uznaniem wraz z ogłoszeniem zwycięzców, przedstawionych przez organizatorów, Uniwersytet Hohenheim i Uniwersytet Wageningen. Ogólnym zwycięzcą imprezy w 2021 r. jest zespół Bullseye z Uniwersytetu Wageningen w Holandii, który został oceniony na podstawie czterech zadań terenowych, które obejmowały nawigację w zakrzywionych rzędach kukurydzy, w rzędach prostych z brakującymi roślinami lub bez nich, rozpoznawanie chwastów i ściółki a następnie usunięcie na uwrocie. Wydarzenie freestyle, opcjonalne wydarzenie, które pozwala zespołom uczniowskim pokazać swoje umiejętności inżynierskie w rozwiązywaniu samodzielnie wybranego zadania rolniczego, zostało wygrane przez zespół Ceres z Uniwersytetu Nauk Stosowanych w Münster dzięki robotowi do zbioru, który był w stanie wykryć i zbierać dynie .
518 międzynarodowych widzów dostraja się
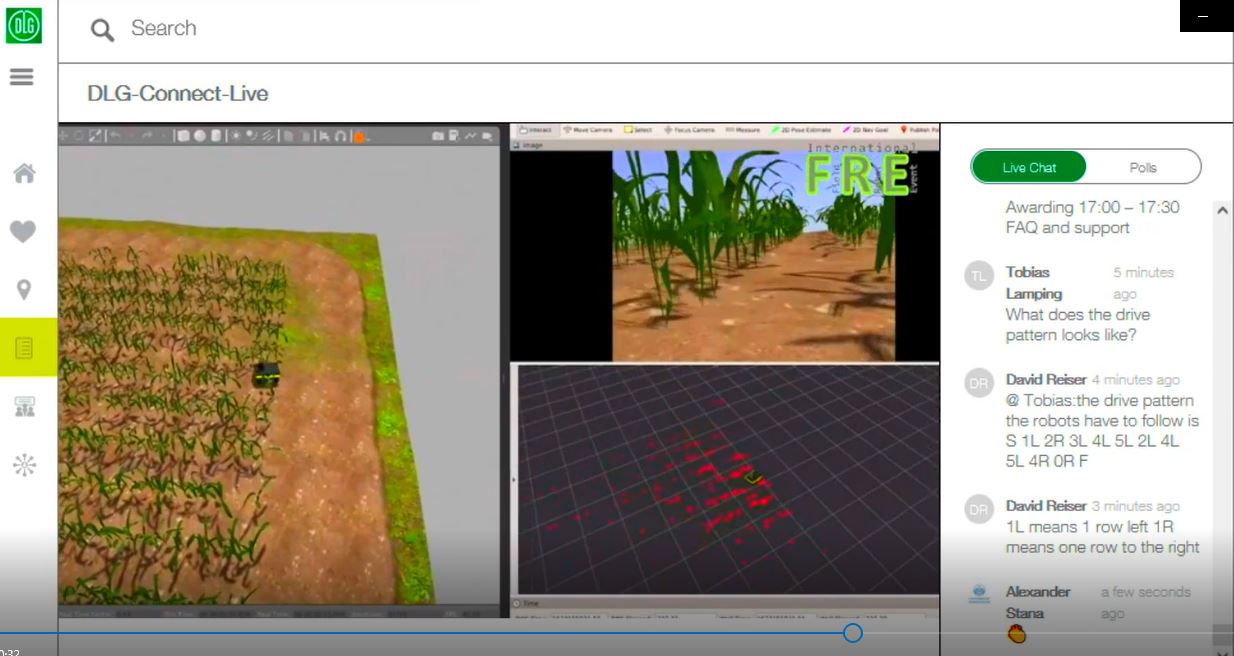
Wydarzenie przyciągnęło 518 widzów z całego świata, wśród których byli nie tylko specjaliści techniczni i akademiccy, inżynierowie, pracownicy uczelni i studenci, ale także rolnicy z różnych krajów. Uczestnicy z branży, tacy jak menedżerowie produktu, wzięli również udział w wydarzeniu na żywo, które relacjonowali międzynarodowi dziennikarze, dostrajając się, aby oglądać roboty w fotorealistycznym środowisku symulacyjnym podobnym do tego, którego używa NASA do eksploracji kosmosu. Za pośrednictwem czatu na żywo widzowie mieli możliwość interakcji z 14 międzynarodowymi zespołami z Danii, Niemiec, Holandii, Rumunii i Słowenii, a także ekspertami i innymi widzami.
Nagroda Collaboration Award za rozwój wirtualnych pól kukurydzy
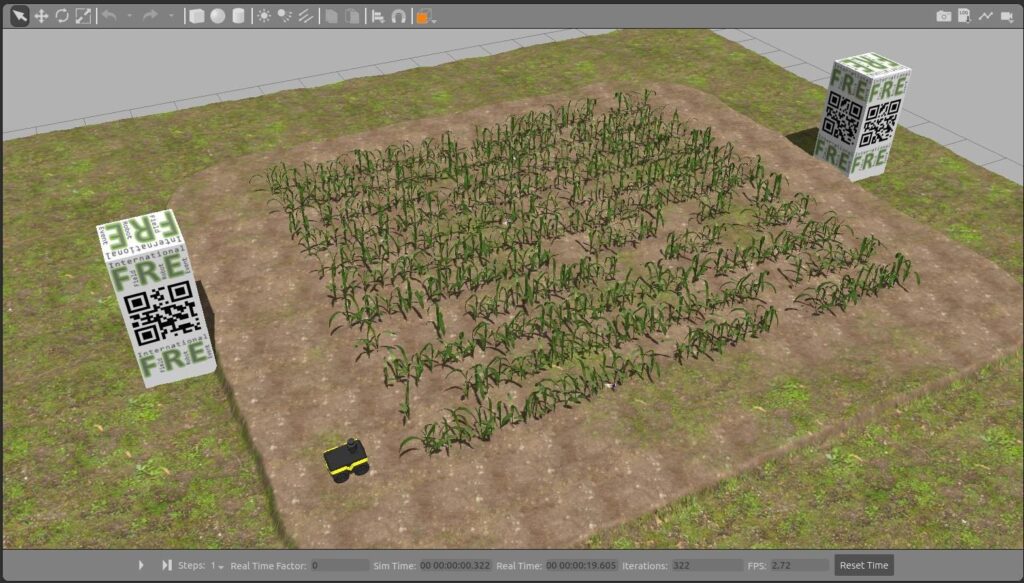
Honorowa nagroda za współpracę została przyznana Kamaro Engineering, studenckiemu zespołowi inżynierskiemu zajmującemu się innowacyjnymi robotami terenowymi z Karlsruhe Institute of Technology (KIT). Nagroda za współpracę uznaje wkład w rozwój wirtualnego pola kukurydzy w symulowanych środowiskach. Prace te obejmowały napisanie kodu, który dokładnie opisywał, jak wyglądają rośliny kukurydzy i inne komponenty, a także stworzenie rzeczywistych efektów, takich jak wiatr i cienie, w celu odegrania szeregu scenariuszy na polu rolniczym, w szczególności rozpoznawania chwastów i wykrywania przeszkód.
Dwa zespoły talentów w wieku szkolnym
W tym roku dwa zespoły – Carbonite i Camper Robotic – składały się z dzieci w wieku szkolnym z uzdolnieniami technicznymi odpowiednio z niemieckich miast Hamburg i Überlingen. Zespół Camper Robotic opracował unikalny robot typu „Segway” o nazwie Field Balancer. Zespół Carbonite spisał się doskonale w kilku zadaniach, zajmując trzecie miejsce w ogólnej klasyfikacji.
„To wirtualne wydarzenie było premierą i jesteśmy bardzo zadowoleni z wyniku i opinii uczniów. Symulowane środowisko to duża część prac rozwojowych nad robotem terenowym. Uważam, że to wydarzenie, odbywające się na żywo w symulowanym środowisku, jest świetnym i wymagającym ćwiczeniem, które nie tylko pozwala ustalić, do czego jest zdolny system, ale także porównać go z innymi zespołami. Przyniesie to znaczne korzyści w nauce przez wiele nadchodzących miesięcy” – powiedział prof. Hans W. Griepentrog, dyrektor sekcji technologii produkcji roślinnej na Uniwersytecie w Hohenheim w Niemczech.
„Środowiska symulacyjne ROS Gazebo, które stworzyliśmy specjalnie na to wydarzenie, były przydatne dla zespołów studenckich, dlatego postanowiliśmy udostępnić je po zakończeniu konkursu, aby studenci mogli przetestować swoje przyszłe symulacje robotów terenowych na tej platformie, ” podsumował prof. Griepentrog.
Impreza freestyle – koncepcje na przyszłość
Zadanie freestyle'owe w ramach imprezy jest zawsze punktem kulminacyjnym dla widzów i oferuje okno w przyszłość dzięki wizjonerskim koncepcjom zastosowań terenowych, wybranym i opracowanym przez same zespoły. W ramach kategorii opcjonalnej w konkursie, zespoły studenckie miały okazję wykazać się umiejętnościami wypracowania rozwiązania wybranego przez siebie praktycznego zadania terenowego. Na tegorocznej imprezie zadania freestyle'owe uczniowie zaprezentowali w formie filmów wideo. Zadania freestyle obejmowały robota żniwnego z Ceres, zwyciężając w kategorii freestyle. Na drugim miejscu, opracowanym przez zespół FarmBeast z Uniwersytetu Maribor, był opryskiwacz zdolny do rozpoznawania chwastów i opryskiwania celów tylko w razie potrzeby, przyczyniając się do ochrony gleby. Na trzecim miejscu znalazł się zespół Kamaro ze swoim robotem polowym Beteigeuze, prezentującym się jako modułowy, samokonfigurujący się robot polowy z wieloma przystawkami, w tym osprzętem na przyczepie.
Międzynarodowe wydarzenie robotów terenowych to międzynarodowe zawody robotów terenowych obejmujące różnorodne zadania terenowe. Poruszanie się robota między zakrzywionymi rzędami upraw, rozpoznawanie obiektów, które są chwastami lub po prostu śmieciami i mapowanie obiektów za pomocą georeferencji, to część wyzwań, które rozwiązują roboty terenowe za pomocą czujników i algorytmów. Interpretowanie informacji w czasie rzeczywistym, na przykład określanie, co jest chwastem za pomocą kamery, jest złożone i wymaga wielu miesięcy wcześniejszych prac rozwojowych. Kolejne zadanie wymagało usunięcia chwastów i śmieci, gdzie potrzebne jest dokładne sterowanie programowe siłownikami obsługującymi narzędzie. Wyzwaniem jest inteligentne zrozumienie danych w danym dniu, co wiąże się z interpretacją danych przez robota i podejmowaniem optymalnych decyzji. Kluczowymi kryteriami oceny były złożoność, wydajność i przydatność rolnicza.
Dostępne filmy z konkursu
Filmy na żądanie z trzydniowej imprezy robotów terenowych, które zawierają wszystkie symulowane zadania terenowe, komentarze sędziów i filmy przesłane przez zespoły do zadania w stylu dowolnym, są dostępne na platformie internetowej DLG jako osobne łącza dla każdego dnia imprezy:
8 czerwca: Żegluga po polu kukurydzy z łukami rzędowymi; Proste rzędy z brakującymi roślinami. Połączyć
9 czerwca: Wykrywanie i georeferencja chwastów i obiektów; usuwanie na uwrocie. Połączyć
10 czerwca: Wydarzenie Freestyle. Połączyć
Pełne dane zwycięzców każdej z pięciu kategorii oraz ich wyniki są dostępne na stronie. https://www.fieldrobot.com/event/
Międzynarodowe wydarzenie dotyczące robotów polowych odbyło się na platformie cyfrowej DLG, na której odbywają się również zakrojone na szeroką skalę cyfrowe imprezy rolnicze. Platforma jest platformą połączeń, która oferuje swoim użytkownikom zarówno zawartość produktu, jak i interakcje indywidualne, grupowe lub publiczne.
Praktyczne badania robotów terenowych od 2003 roku
Konkurs robotów terenowych, zainicjowany w 2003 r. przez Uniwersytet Wageningen w Holandii, testuje pionierską robotykę i technologie rolnictwa precyzyjnego w warunkach rzeczywistych i daje młodym naukowcom możliwość wymiany i rozwijania swoich pomysłów wraz z rówieśnikami. Podobnie jak w przypadku imprezy terenowej, zawodnicy w wirtualnym wydarzeniu mieli możliwość interakcji między sobą oraz z widzami z całego świata. Ta interakcja jest ważną częścią wydarzenia i pomogła im rozwinąć ich koncepcje.
Impreza Robotów Terenowych 2021, która odbywa się na targach DLG-Feldtage od 2014 roku, zapewniła robotom i ich wynalazcom wymagające testy wirtualne, a wirtualnym widzom ekscytującą rozrywkę.]

{kind=link}